|
I am a PhD student at UC Berkeley advised by Professor Ken Goldberg. I am also a research intern at NVIDIA, working with Jim Fan and Yuke Zhu. I work on multi-modal models for both perception and robot learning. I am interested in scaling robot foundation models by investigating various approaches to expand robot datasets and leveraging priors from existing foundation models. I received B.A./M.S. in Computer Science and Applied Mathematics from UC Berkeley in 2023. Email / Google Scholar / Twitter / Resume |
|
|
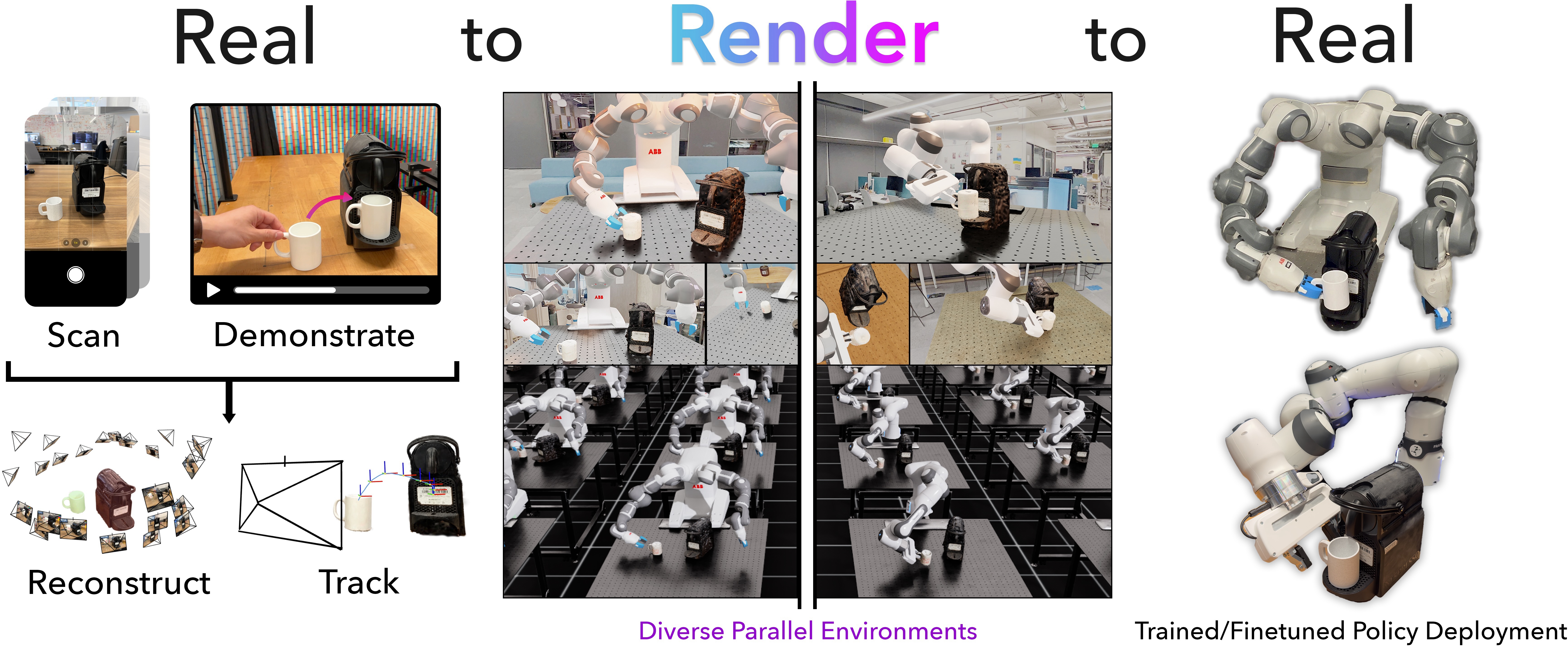
Justin Yu*, Letian Fu*, Huang Huang, Karim El-Refai, Rares Ambrus, Richard Cheng, Muhammad Zubair Irshad, Ken Goldberg *Equal contribution CoRL 2025, Oral Presentation, Paper, Website, Code |
|
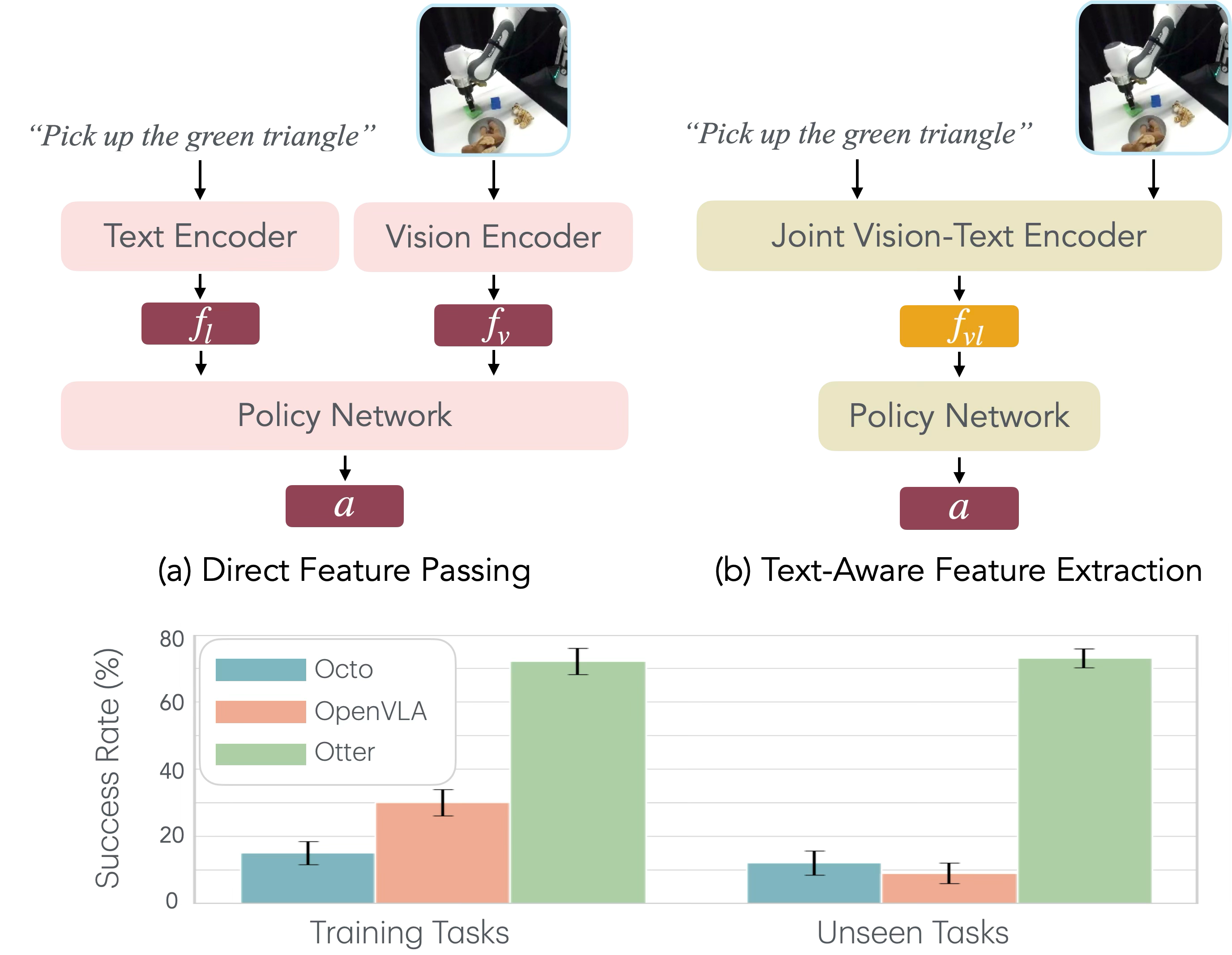
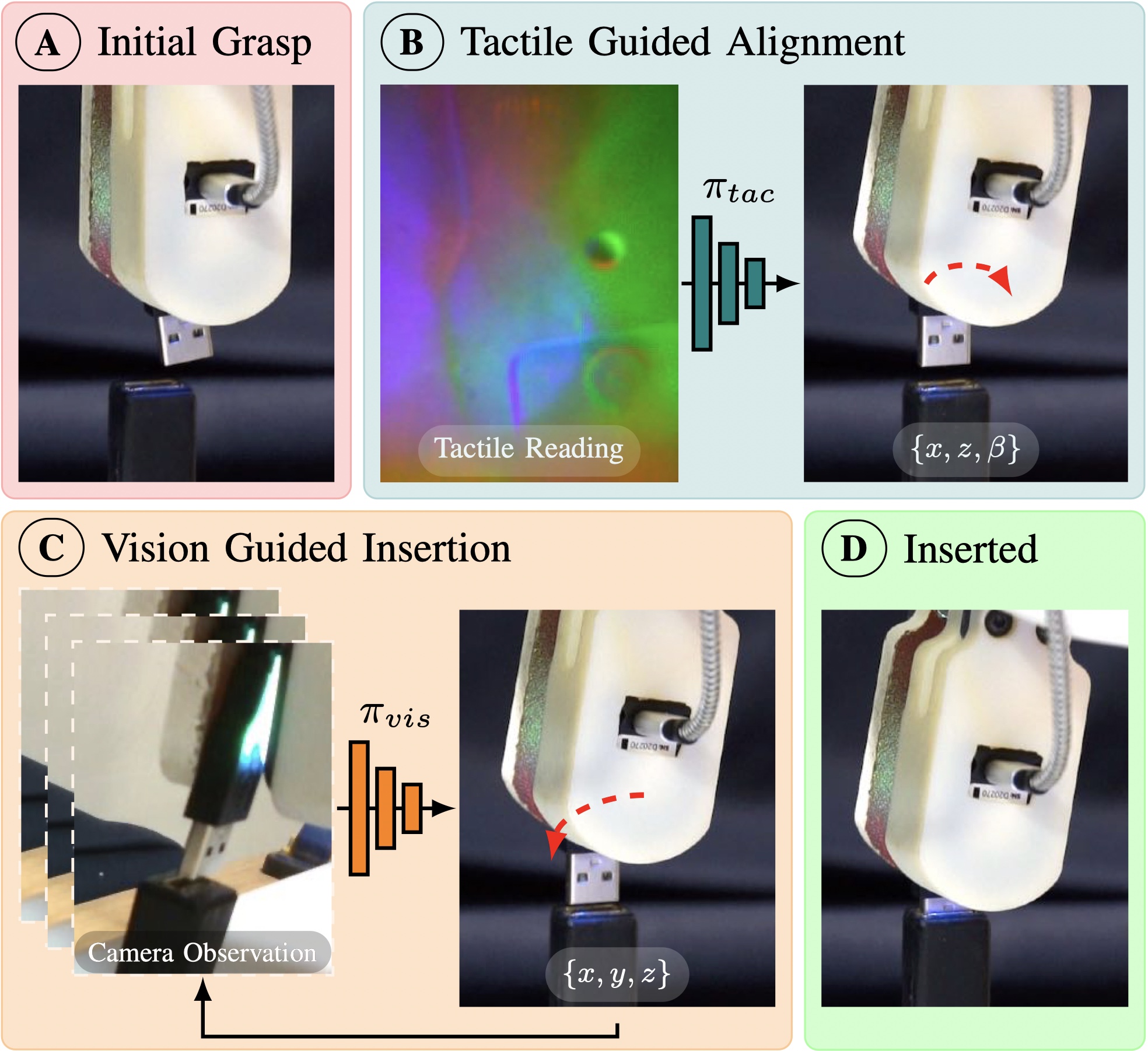
Huang Huang*, Fangchen Liu*, Letian Fu*, Tingfan Wu, Mustafa Mukadam, Jitendra Malik, Ken Goldberg, Pieter Abbeel *Equal contribution ICML 2025, Paper, Website, Code |
|
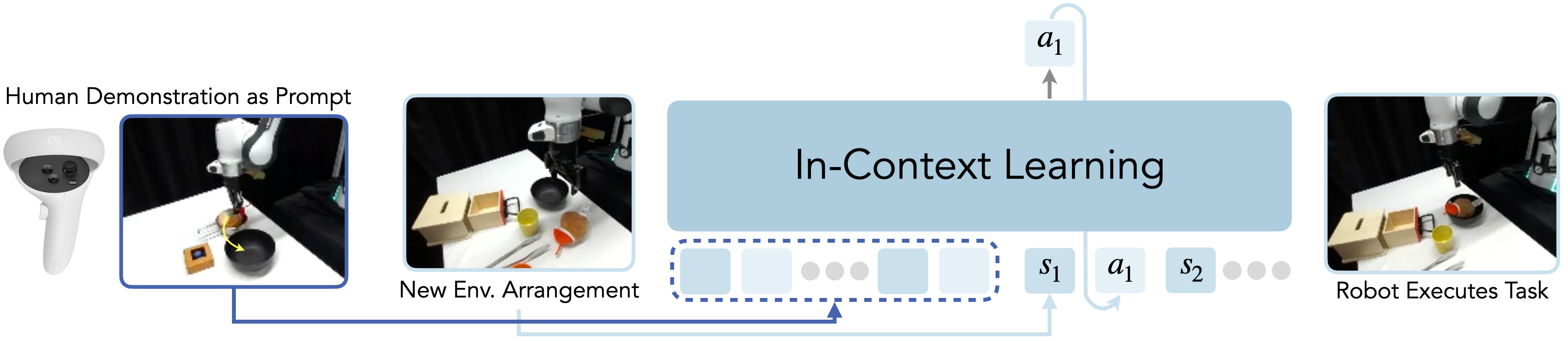
Letian Fu*, Huang Huang*, Gaurav Datta*, Lawrence Yunliang Chen, William Chung-Ho Panitch, Fangchen Liu, Hui Li, Ken Goldberg *Equal contribution ICRA 2025, Paper, Website, Code, Dataset |
|
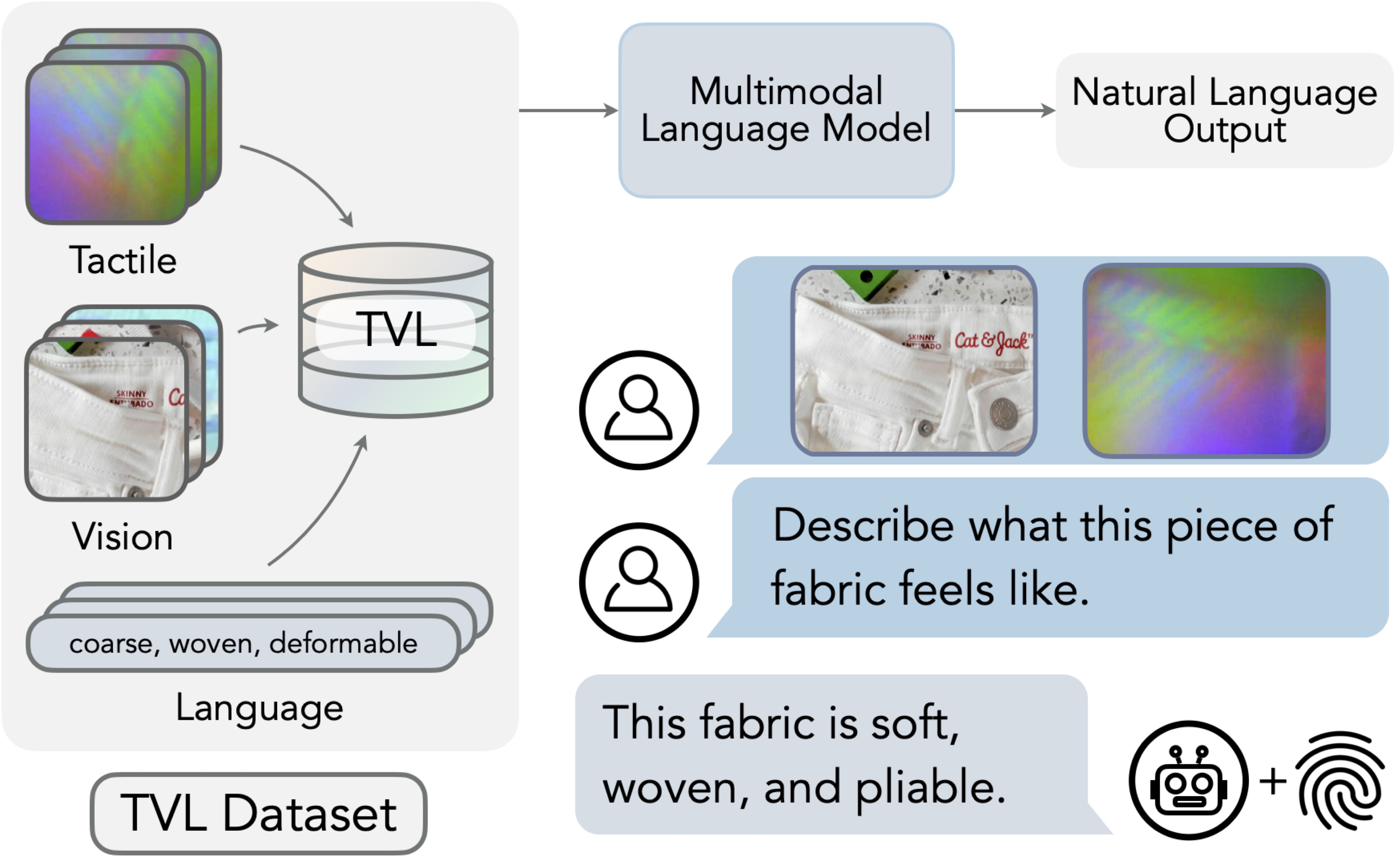
Letian Fu, Gaurav Datta*, Huang Huang*, William Chung-Ho Panitch*, Jaimyn Drake*, Joseph Ortiz, Mustafa Mukadam, Mike Lambeta, Roberto Calandra, Ken Goldberg *Equal contribution ICML 2024, Oral Presentation, OpenReview, Website, Code, Dataset |
|
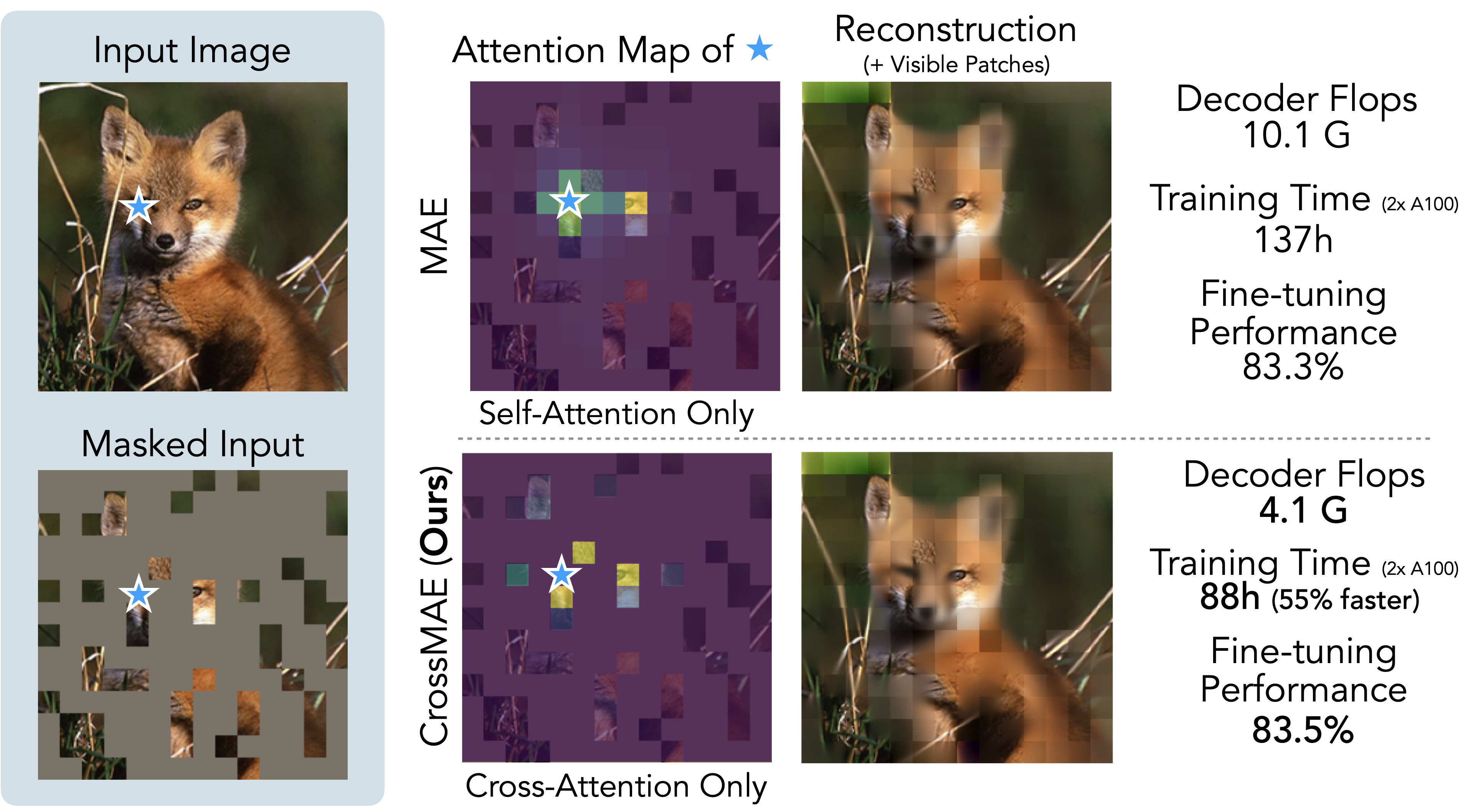
Letian Fu*, Long Lian*, Renhao Wang, Baifeng Shi, Xudong Wang, Adam Yala†, Trevor Darrell†, Alexei A Efros†, Ken Goldberg† *Equal contribution, †Equal advising TMLR 2025, Paper, Website, Code |
|
|
Ilija Radosavovic, Baifeng Shi, Letian Fu, Ken Goldberg, Trevor Darrell, Jitendra Malik CoRL 2023, Oral Presentation, OpenReview |
|
Letian Fu, Huang Huang, Lars Berscheid, Hui Li, Ken Goldberg, Sachin Chitta, ICRA 2023, arXiv |
|
|
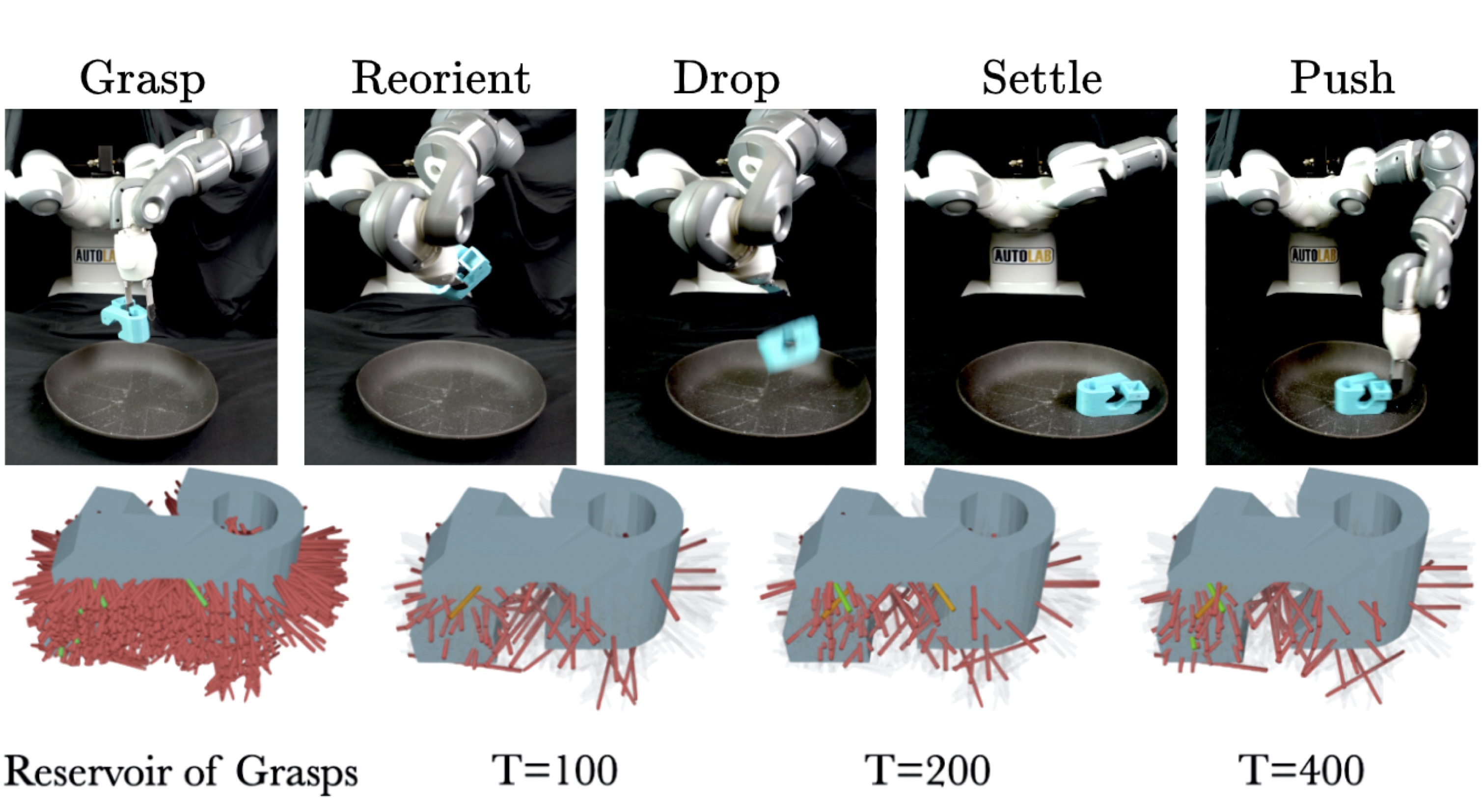
Justin Kerr, Letian Fu, Huang Huang, Yahav Avigal, Matthew Tancik, Jeffrey Ichnowski, Angjoo Kanazawa, Ken Goldberg CoRL 2022, Oral Presentation, OpenReview |

|
Letian Fu*, Huang Huang*, Michael Danielczuk, Chung Min Kim, Zachary Tam, Jeffrey Ichnowski, Anelia Angelova, Brian Ichter, and Ken Goldberg, *Equal contribution ISRR 2022, arXiv |
|
Letian Fu, Michael Danielczuk, Ashwin Balakrishna, Daniel S. Brown, Jeffrey Ichnowski, Eugen Solowjow, Ken Goldberg, ICRA 2022, IEEE, arxiv |

|
Huang Huang, Michael Danielczuk, Chung Min Kim, Letian Fu, Zachary Tam, Jeffrey Ichnowski, Anelia Angelova, Brain Ichter, Ken Goldberg, ICRA 2022, IEEE, arXiv |
|
Website is in part based on Jon Barron's site. |